多軸ロボット システムでは、エンドエフェクタの位置精度、再現性、動的応答性は、制御アルゴリズムの高度さだけによって決まるわけではありません。これらは基本的に、運動連鎖を構成する個々の関節アクチュエータの機械的帯域幅、バックラッシュ特性、およびトルク密度によって制約されます。エンドエフェクターの精度がミリメートル未満の 6 軸多関節ロボットでは、各ジョイントがアーク秒範囲の角度位置決め分解能を実現し、ペイロードによるモーメントによるたわみを防ぐねじり剛性が必要です。
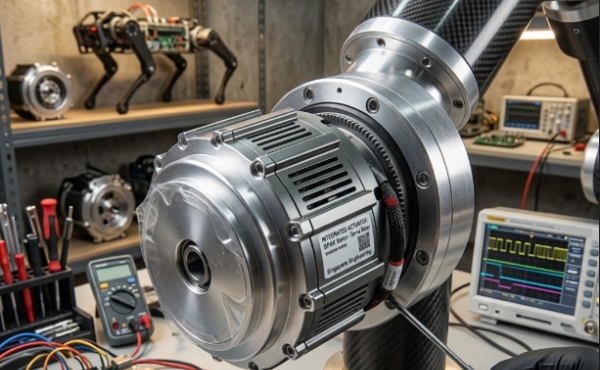
iHF グループのロボットジョイント モーター アクチュエーター: ND-A5215-10 は、この制約層の目的に合わせて設計されたソリューションです。 iHF グループは、一般的なサーボ モーター、ギアボックス、およびエンコーダーをジョイント構成に組み立てるのではなく、これらのサブシステムを、特にロボット関節運動の機械的、熱的、および制御ダイナミクス向けに最適化された統合アクチュエーター モジュールに統合しました。
統合された電気機械アーキテクチャ
フレームレス トルク モーター トポロジ
従来のロボット ジョイントの設計では、機械的カップリングを介して遊星歯車またはハーモニック ドライブ ギアボックスに結合された内蔵サーボ モーターが使用されています。このアセンブリにより、アライメント誤差、カップリングのバックラッシュ、および軸方向の長さの増加が生じ、ジョイントのコンパクトさと動的応答が損なわれます。
ND-A5215-10 は、ローターがジョイントの出力シャフトに、ステーターがジョイントのハウジングに直接組み込まれたフレームレス トルク モーター アーキテクチャを採用しています。個別のモーターハウジングとカップリングインターフェイスが不要になったことにより、従来のアセンブリと比較してジョイントの長さが 30 ~ 40% 短縮され、可搬質量比が向上し、ロボットのエンベロープがよりコンパクトになります。ダイレクトドライブ トルク モーターは、45 Nm のピーク能力で 15 Nm の連続トルクを提供し、多段減速機の効率損失やバックラッシュを発生させることなく、ロボットの関節関節動作に必要な低速での高いトルク密度を提供します。
ハーモニックドライブの精密減速
フレームレス トルク モーターは優れたトルク密度を提供しますが、一般的なロボットの関節動作プロファイル (通常 30 ~ 120 RPM) に必要な出力速度では速度を下げる必要があります。 ND-A5215-10 は、歯車比 100:1 のハーモニックドライブ減速機を統合し、遊星式やサイクロイド式では再現できないバックラッシゼロ特性の一段減速を実現します。
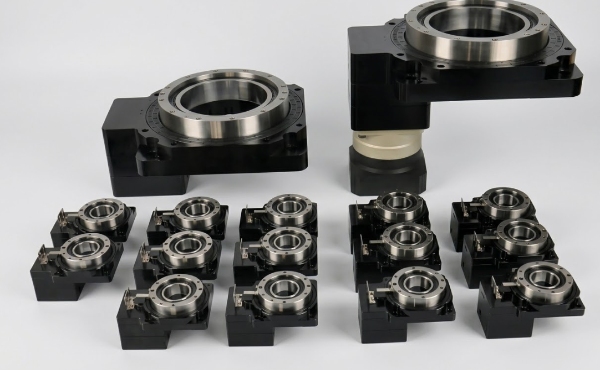
ハーモニック ドライブ技術では、サーキュラ スプラインに対してウェーブ ジェネレータによって変形されるフレクスプラインを採用し、同時に複数の歯をかみ合わせて負荷を利用可能な歯の 30% に分散します。この係合形状により、±10 秒角の位置再現性と 20,000 Nm/rad を超えるねじり剛性が得られます。この仕様は、多軸構成におけるエンドエフェクターの精度に直接反映されます。
iHF グループの精密ロボット ジョイント モーター アクチュエーターの製造では、フレクスプラインの歯の形状、サーキュラー スプラインの穴の形状、ウェーブ ジェネレーターのベアリングの振れのプロファイル測定を通じてハーモニック ドライブ コンポーネントを検証しています。アセンブリには、疲労寿命を損なう過度のフレクスプライン応力を誘発することなく、かみ合い接触パターンを最適化するプリロードプロトコルが組み込まれています。
デュアルアブソリュートエンコーダフィードバックアーキテクチャ
ロボット ジョイントの位置制御には、整流およびベクトル電流制御のためのモーター ローターの位置と、ジョイント レベルのサーボ ループを閉じるための出力シャフトの位置という 2 つの異なる点でのフィードバックが必要です。 ND-A5215-10 は、デュアル アブソリュート エンコーダ、つまりモーター ローターの 23 ビット マルチターン エンコーダとハーモニック ドライブ出力の 19 ビット シングルターン エンコーダを統合しています。
このデュアルエンコーダ構成により、モータ位置フィードフォワードによるトルクリップル補償、出力位置フィードバックによるバックラッシュ補償、モータ電流と位置微分値からの瞬時トルク推定による衝突検出など、高度な制御戦略が可能になります。アブソリュートエンコーディングにより、電源投入時の原点復帰シーケンスが不要になり、ロボットの起動時間が短縮され、非常停止後の安全な動作復帰が可能になります。

熱管理と連続使用パフォーマンス
熱経路工学
フレームレス トルク モーターはステーター巻線で抵抗損失 (I²R) を生成しますが、絶縁劣化や希土類ローター マグネットの減磁を防ぐために、この損失を消散する必要があります。モーターがジョイントハウジング内に組み込まれているコンパクトなジョイント構成では、従来の空冷は実用的ではありません。
ND-A5215-10 は、ジョイント ハウジングに統合された液体冷却回路を採用しており、ステーター積層スタックに直接接触するアルミニウム合金構造に機械加工された冷却剤通路を備えています。この設計では、巻線から冷却剤までの熱抵抗が 0.15 K/W を達成し、冷却剤入口温度が最大 35°C の場合でも定格トルクでの連続運転が可能になります。設備冷却剤が利用できないアプリケーション向けに、iHF グループは、拡張されたフィン形状と内部強制対流を備えた、熱的に最適化された空冷バージョンを提供します。
熱モデリングと保護
iHF グループは、特定のロボットの動作プロファイルに合わせて校正された熱モデルを提供し、お客様が予想されるデューティ サイクルでの巻線温度上昇を予測できるようにします。統合温度センサー (巻線のエンドターンに埋め込まれた PT1000 RTD) は、損傷しきい値に達する前に電流コマンドをディレーティングする過熱保護機能を備えたリアルタイムの熱モニタリングを提供します。
機械的統合とインターフェースの標準化
中空シャフト構造
ND-A5215-10 は、直径 15 mm の中央貫通穴を備えており、電源ケーブル、信号配線、空気圧ライン、または光ファイバーを外部に配線するのではなく、ジョイントの中心に通すことができます。この中空シャフト設計により、多軸ロボットにおけるケーブル管理の複雑さが解消され、動作中の引っ掛かりのリスクが軽減され、人間の接近が予想される協働ロボット用途においてきれいな外部形状が維持されます。
実装インターフェースの互換性
iHF グループは、ND-A5215-10 メカニカル インターフェイスを ISO 9409-1 フランジ パターンに標準化し、カスタム アダプターの製造なしで市販のロボット アームとの直接統合を可能にします。出力シャフトには、アクチュエータのピーク出力を超えるトルク伝達能力を備えたキー付きインターフェースまたはスプラインインターフェースが組み込まれており、失速または衝突状態でのインターフェースの故障を防ぎます。


制御システムの統合
EtherCAT通信プロトコル
ND-A5215-10 は、サーボ ドライブ エレクトロニクスと EtherCAT フィールドバス通信を統合し、位置コマンドの更新で 1ms のサイクル タイム、トルク ループの終了で 125μs のサイクル タイムを実現します。この通信帯域幅は、協調ロボットの力制限のためのインピーダンス制御、関節レベルの加速度フィードバックによる振動抑制、モーターパラメータのトレンド分析による予知保全など、高度なモーション制御アルゴリズムをサポートします。
安全機能の統合
SIL 3 / PL e に準拠した機能安全は、冗長位置監視 (相互比較を備えたデュアル エンコーダ)、ハードウェア インターロックを備えた安全トルク オフ (STO) 回路、および重力負荷軸の安全ブレーキ制御によって実現されます。 iHF グループは、顧客の CE マーキングおよび機能安全認証プロセスをサポートするために、FMEDA 分析やフォールト挿入テスト レポートなどの安全文書を提供します。
アプリケーションドメイン
協調ロボティクス
ND-A5215-10 のコンパクトなエンベロープ、低反射慣性、および力に敏感な制御機能により、人間とロボットの相互作用で外部保護ではなくトルクと位置の監視による本質的安全性が必要な協働ロボットのジョイントに適しています。ハーモニックドライブの高いバックドライブ能力により、制御システムがエンドエフェクターで 150N 未満の接触力を検出し、外力が加えられたときに柔軟な動作が可能になります。
外科および医療ロボット工学
医療ロボットのアプリケーションでは、滅菌への適合性、手術室環境に対する電磁適合性、組織操作のための位置精度が求められます。 iHF グループは、医療グレードの表面仕上げ、生体適合性潤滑剤、IEC 60601-1 電磁両立性要件を満たすシールド ケーブル アセンブリを備えた ND-A5215-10 を提供しています。
半導体およびエレクトロニクス製造
クリーンルームへの適合性 (ISO クラス 3)、最小限の微粒子発生、および振動のない動作は、ウェーハの取り扱いや電子機器の組み立てにおいて不可欠です。 ND-A5215-10 の密閉型ハーモニック ドライブとフレームレス モーターは、ブラシの摩耗破片を排除し、高精度のバランスとベアリングのプリロードにより、敏感なプロセス機器への振動伝達を最小限に抑えます。
よくある質問
Q: ND-A5215-10 を 6 軸ロボット構成で使用する場合の最大可搬質量はどれくらいですか?
A: ペイロード容量は、アクチュエータのトルクだけではなく、アームの長さ、加速プロファイル、デューティ サイクルによって決まります。関節 2、3、および 4 に ND-A5215-10 を搭載し、手首関節に小型のアクチュエーターを備えた一般的な 800 mm リーチの 6 軸ロボットの場合、最大可搬質量は 50% デューティ サイクル、1 g 加速で約 10 ~ 15 kg です。 iHF グループは、特定のロボットの形状や動作要件に合わせてアクチュエータの選択を最適化するための運動学シミュレーション ツールを提供しています。
Q: ND-A5215-10 は、最大 40°C の周囲環境で液体冷却なしで動作できますか?
A: 空冷式は、自然対流の場合は周囲温度 35°C まで、定格トルクの 80% までのディレーティングで最大 40°C まで定格連続トルクを維持します。 40°C を超える温度で継続的に動作する場合、または空気流が制限された狭い設置場所で使用する場合は、液体冷却をお勧めします。 iHF グループの熱シミュレーション サービスは、特定の設置条件におけるパフォーマンスを予測できます。
Q: ハーモニックドライブ減速機の推奨メンテナンス間隔はどれくらいですか?
A: 通常の運転条件 (定格トルク、適度な衝撃荷重、適切な潤滑) では、ハーモニック ドライブ フレクスプラインは 10,000 時間を超える運転疲労寿命を示します。 iHF グループは、振動分析による出力軸受の状態の年次検査と、5,000 運転時間または 2 年ごとのいずれか早い方での潤滑剤の交換を推奨しています。統合された状態監視機能は、予知保全アルゴリズムを通じてこれらの間隔を延長できます。
Q: ND-A5215-10 はサードパーティ製サーボ コントローラーと互換性がありますか?
A: ND-A5215-10 は、iHF グループの統合サーボ ドライブとの統合用に最適化されていますが、モーター パラメータ (相抵抗、インダクタンス、逆起電力定数、エンコーダ プロトコル) は、サードパーティ製コントローラの統合をサポートするために文書化されています。お客様は、非統合コントローラを指定する前に、現在のループ帯域幅と整流アルゴリズムの互換性を iHF グループのアプリケーション エンジニアリング チームと確認する必要があります。
Q: バックラッシュの仕様は何ですか? それはロボットの再現性にどのように影響しますか?
A: ハーモニックドライブ減速機は、その弾性噛み合い形状によりバックラッシゼロを実現しています。出力シャフトで測定されたヒステリシスは、無負荷条件下で通常 ±3 秒角です。実際のロボットアプリケーションでは、ギアのバックラッシュよりも構造コンプライアンスとエンコーダ分解能が再現性を支配し、適切に設計されたキネマティックチェーンでは、ND-A5215-10 がシステム全体の再現性誤差に寄与するのは 5% 未満です。

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar 見積もり依頼
見積もり依頼