協働ロボット (協働ロボット) や産業用咬合器から人型二足歩行システムに至るまで、高度なロボット工学の進化には、前例のないレベルの出力密度、ねじり剛性、位置決めの忠実度が求められます。あらゆる関節運動の中心にはアクチュエーター モジュールがあります。これらの厳しい機械的制約を満たすために、最新のオートメーション アーキテクチャには、電磁効率とゼロ バックラッシュの機械的低減を統合する、高度に統合されたロボット ジョイント モーター ギアボックスが必要です。
産業用トランスミッションおよびモーション制御ソリューションの主要なパイオニアとして、iHF グループは最先端の統合サーボ アクチュエータ モジュールを開発しました。 iHFグループは、超低コギングトルクの永久磁石モータと高精度遊星歯車減速機を組み合わせることで、次世代ロボットシステムに必要な機械的基盤を提供します。
⚙️1.ロボットジョイントモーターギアボックスとは何ですか?
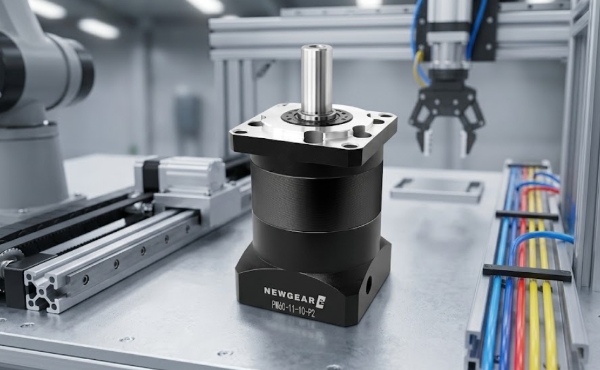
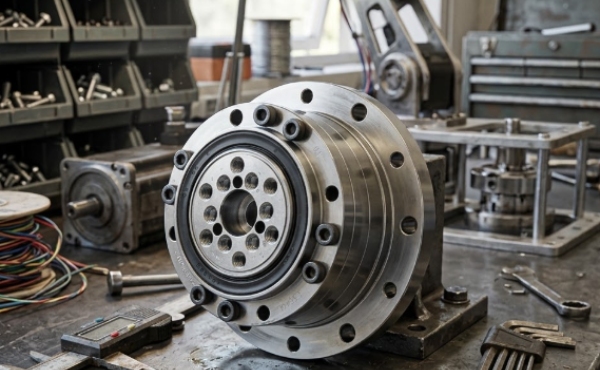
ロボット ジョイント モーター ギアボックスは、ロボット ジョイントで使用される統合電気機械システムで、モーターの高速、低トルク出力を正確な制御性で低速、高トルクの動作に変換します。通常、サーボ モーターまたはブラシレス モーター、高精度ギアボックス (多くの場合、遊星歯車またはヘリカル ギア減速)、およびエンコーダーなどのフィードバック システムを組み合わせて、トルク、速度、位置の閉ループ制御を実現します。これにより、ロボット関節は安定した低速動作、素早い方向反転、高トルク密度、低振動、低騒音性能を維持することができます。また、高度な設計により、モーターのスロット構造が最適化されてトルク効率が向上し、コギング トルクが低減されて動作がよりスムーズになり、精度を高めるためにデュアル エンコーダが組み込まれる場合もあります。ハイエンド構成では、デイジーチェーン通信を介して複数のユニットを接続し、多軸ロボット システムでの電力とデータの送信を簡素化できます。全体として、これは産業用ロボット、協働ロボット、および自動モーション システムの精密な動作を可能にするコア コンポーネントです。


🔩 2. ロボットジョイントモーターギアボックスのコア機能アーキテクチャ
ロボット ジョイント モーター ギアボックス システムは、モーター駆動技術と高精度減速機構を統合し、ロボット ジョイントの動作の制御を可能にします。
その主な機能は次のとおりです。
●トルク増幅
● 速度の低減と安定化
● 正確な位置制御
● スムーズな方向転換
これにより、ロボットは複雑な動作を高い再現性と精度で実行できるようになります。
🎯 3. 主なパフォーマンス上の利点
⚡ 3.1 低速精密制御
ロボット工学における最も重要な要件の 1 つは、低速での安定した動作です。システムは以下を維持します。
● 安定したトルク出力
● 微動精度
● スムーズな回転挙動
これは、組み立て、溶接、手術ロボットなどの作業に不可欠です。
🔄 3.2 高速方向反転機能
ギアボックスにより、方向変更時のモーターの高速応答が可能になり、以下が改善されます。
● サイクルタイムの効率化
● 動きの柔軟性
● ロボットアームの動的応答性
🔁 3.3 閉ループ制御システム
最新のロボット関節システムの重要な機能は閉ループ フィードバック制御であり、次のことを可能にします。
● トルク制御
● 速度規制
● 正確な角度位置決め
これにより、ロボットの動作がリアルタイムで継続的に修正され、最高の精度が保証されます。
🌊 3.4 低振動・低騒音運転
最適化された構造設計により、機械的不安定性が最小限に抑えられ、次のような効果が得られます。
● 振動振幅の低減
● 低騒音出力
● よりスムーズな操作性
これは、人間の近くで作業する協働ロボットにとって特に重要です。
🧠 4. 高度なエンジニアリング設計機能
🧩 4.1 高トルク密度モータースロット設計
モーターは最適化されたスロット形状で設計されており、以下の点が改善されています。
● 電磁効率
● トルク密度出力
● コギングトルクの低減
これにより、コンパクトなロボット関節構造のより高いパフォーマンスが可能になります。
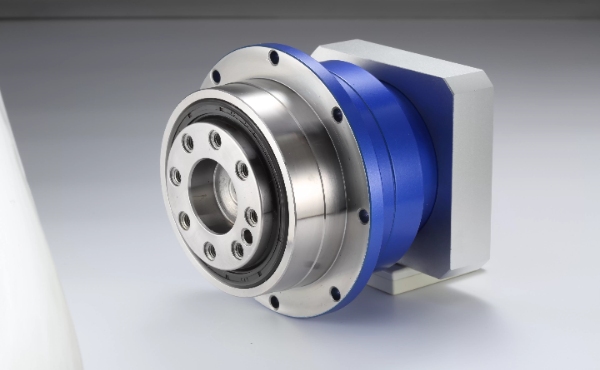
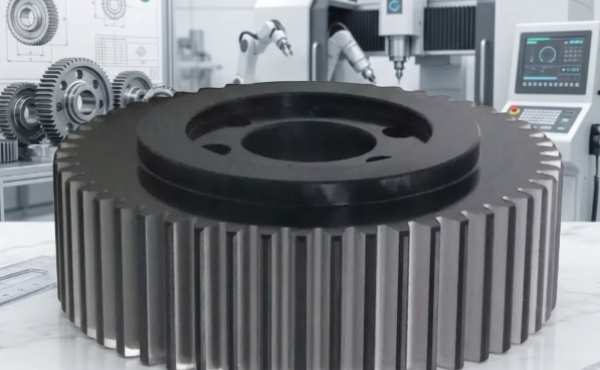
⚙️ 4.2 高精度遊星歯車減速機
ギアボックスの中心には、ヘリカル遊星歯車システムがあり、次の目的で設計されています。
● 高い荷重伝達効率
● 安定したトルク変換
● 機械的バックラッシュの低減
このシステムは、3 分角未満の歯元真円度精度を達成し、ロボット動作制御における優れた位置精度を保証します。
🎛️ 4.3 デュアルエンコーダーフィードバックシステム
高度な構成ではデュアル エンコーダがサポートされ、以下が大幅に強化されます。
● 位置精度
● トルクフィードバック分解能
● システムの冗長性と安定性
これにより、ハイエンドのオートメーション環境での超精密なロボット動作が可能になります。
🔗 4.4 デイジーチェーン通信アーキテクチャ
システムはデイジーチェーン構成をサポートしており、次のことが可能です。
● 簡素化された配線アーキテクチャ
● インストールの複雑さを軽減
● 複数のジョイントにわたる統合された電力とデータ伝送
これは、多軸ロボット システムやヒューマノイド ロボット プラットフォームで特に価値があります。
🏭 5. ロボットジョイントモーターギアボックスシステムの産業応用
🤖 産業用ロボット
溶接、組み立て、マテリアルハンドリング用のロボットアームに使用されます。
🏥 医療ロボット
超高精度な動作精度が要求される手術ロボットをサポートします。
🧑🤝🧑 協働ロボット (コボット)
低騒音と低振動で安全かつスムーズな人間とロボットのインタラクションを可能にします。
🚗 自動車製造
精密組立ラインや自動生産システムで使用されます。
📦 物流自動化
ロボットによる仕分け、ピッキング、梱包システムをサポートします。

🏗️ 6. ギアボックス選択のエンジニアリング上の重要性
適切なロボット ジョイント モーター ギアボックスを選択することは、以下に直接影響するため重要です。
● 動作精度
● 耐荷重
● システムの安定性
● 寿命
● エネルギー効率
ギアボックスの設計が不十分だと、次のような結果が生じる可能性があります。
● バックラッシュエラー
● 過熱
● 振動が不安定
● ロボットの精度が低下する
🏢 7. iHFグループのロボットモーションシステムにおけるエンジニアリングイノベーション
モーションおよびトランスミッション システムの専門メーカーとして、iHF グループは、現代のロボット工学向けに設計された高性能ロボット ジョイント モーター ギアボックス ソリューションを開発しています。
彼らのエンジニアリングアプローチは以下に重点を置いています。
● 高効率遊星歯車設計
● 精密モーターの統合
● 最適化されたトルク対サイズ比
● 低騒音メカニカルアーキテクチャ
● 高度なフィードバック制御に対応
iHF グループは、汎用の機械コンポーネントを提供するのではなく、システムレベルの動作の最適化を重視し、高度なロボット プラットフォームへのシームレスな統合を保証します。
🚀 8. ロボット関節モーターギアボックス技術の将来動向
ロボット産業は急速に進化しており、ギアボックス システムの革新を推進しています。
● AI による動き補正
● 高トルク密度小型化
● 超低バックラッシギヤシステム
● 完全に統合されたスマート アクチュエーター
● 人型ロボットのエネルギー効率の向上
これらのトレンドは、次世代のインテリジェント ロボット モーション システムを定義します。
🧾 9. FAQ: ロボットジョイントモーターギアボックス
❓ ロボットジョイントモーターギアボックスと標準ギアボックスの違いは何ですか?
モーター制御と精度低減を単一システムに統合し、ロボットの動作精度を最適化します。
❓ ロボット工学において低振動が重要なのはなぜですか?
低振動により、より高い精度、よりスムーズな動作が保証され、人間とロボットの相互作用の安全性が向上します。
❓ ロボット工学における遊星ギアボックスの役割は何ですか?
ロボットの関節に高いトルク密度、コンパクトな構造、安定した動作伝達を提供します。
❓ ロボットの関節にデュアルエンコーダを使用する理由は何ですか?
デュアルエンコーダにより、フィードバック精度、冗長性、閉ループモーション制御の安定性が向上します。
❓ これらのシステムから最も恩恵を受けるのはどの業界ですか?
産業オートメーション、医療ロボット、物流システム、自動車製造、協働ロボット。
🧾 結論: 精密動作がロボット工学の未来を定義する
ロボット ジョイント モーター ギアボックスは、現代のロボット工学の基礎コンポーネントであり、さまざまなアプリケーションにわたって正確で安定したインテリジェントなモーション制御を可能にします。
閉ループ制御、デュアルエンコーダフィードバック、遊星歯車の精度、低振動動作などの高度なエンジニアリング機能を備えたこれらのシステムは、次世代のロボット性能に不可欠です。
iHF グループは、継続的なイノベーションを通じて、ロボティクス メーカーがますます複雑化するオートメーション環境においてより高い効率、精度、およびシステムの信頼性を達成できるようにする高精度モーション ソリューションを提供します。

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar 見積もり依頼
見積もり依頼