▌パート I: ロボットの神経系としてのアクチュエーター
ミクロンレベルの外科手術から高速物流仕分けに至るまで、あらゆるロボットの動作は関節アクチュエーターから始まります。しかし、アクチュエータの選択は、システムレベルのエンジニアリングの問題ではなく、調達作業として扱われることがよくあります。
実際には、ロボット関節モーター アクチュエーターは、トルク リップル、熱挙動、エンコーダーの遅延、ギア メッシュの高調波、閉ループの安定性を同時に管理する必要があります。 1 つのパラメータの弱点が運動連鎖全体に伝播し、精度と再現性が低下します。
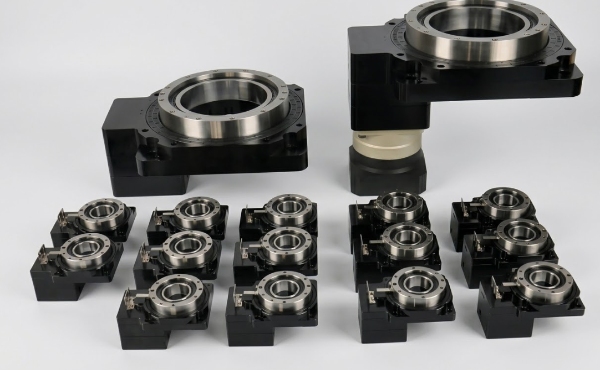
iHF グループが開発したロボットジョイント モーター アクチュエーター ND-A5216-10は、モーター、遊星ギアボックス、デュアル エンコーダーのフィードバックを、個別のコンポーネントではなく統合された共同設計システムに統合することで、この問題に対処します。これにより、インターフェースの損失がなくなり、すべての動作体制にわたる動的一貫性が向上します。

▌パート II: ND-A5216-10 のエンジニアリングの内訳
2.1 電磁設計:コギングトルクの抑制
精密動作における主な課題は、ローターとステーターの相互作用によって生じるコギング トルクです。低速の速度リップル、位置ハンチング、音響ノイズが発生します。
ND-A5216-10 は、最適化されたスロット形状とスキュー磁石ローター設計によりこれを軽減します。有限要素の最適化により、精密な組み立て、力の制御、繊細な挿入作業にとって重要な範囲である 100 RPM 未満でもスムーズなトルク出力が保証されます。
2.2 遊星歯車減速: <3 分角バックラッシュ
アクチュエータには、バックラッシュが 3 分角 (0.05°) 未満の高精度ヘリカル遊星ギアボックスが組み込まれています。 1 メートルのアームでは、これはギアのバックラッシュだけからの先端偏差が 0.87 mm 未満に相当します。
はすば歯車は漸進的な噛み合いを提供し、以下を提供します。
●平歯車に比べてトルク密度が高い
● 振動伝達の低減
● 音響放射を低減し、人体に安全な環境を実現
スパーシステムと比較して、ヘリカル遊星減速により滑らかさと荷重分散が向上し、構造の安定性と動的応答が向上します。
2.3 デュアルエンコーダアーキテクチャ
ギア比を通じて出力の動きを推測するシングル エンコーダー システムとは異なり、ND-A5216-10 はデュアル エンコーダーを使用します。
● 転流および速度制御用のモータ側エンコーダ
● 出力側エンコーダで真のシャフト位置を測定
これにより、バックラッシュ、ねじりコンプライアンス、熱膨張による累積誤差が排除されます。また、モーターと出力の位置偏差を比較することでリアルタイム診断が可能となり、機械的摩耗の早期発見が可能になります。
2.4 統合閉ループ制御
アクチュエータは、カスケード制御ループを通じてトルク、速度、位置の同時調整をサポートします。
● トルクループ: 1 ~ 5 kHz 帯域幅
● 速度ループ: 200 ~ 500 Hz
● 位置ループ: 50~200Hz
フィードフォワード逆ダイナミクスは慣性と非線形効果を補償し、高速加速時の追跡エラーを軽減します。これにより、モードを移行することなく、高速モーションと準拠力制御の間でシームレスに切り替えることができます。

▌パート III: 動的性能と熱性能
3.1 急速な方向反転
ロボット工学のサイクル タイムは、ピーク速度よりも減速と反転によって支配されることがよくあります。 ND-A5216-10 は、以下によって反転遅延を短縮します。
● 低いローター慣性
● 大電流ループ帯域幅
● ギアトレインの機械的コンプライアンスを制御
これにより、振動が最小限に抑えられ、ピックアンドプレース、溶接、検査システムのスループットが向上します。
3.2 熱管理
連続運転では熱安定性が重要です。温度が上昇すると抵抗が増加し、トルク定数が減少し、絶縁体の劣化が促進されます。
アクチュエーターは次の方法でこれに対処します。
● 高銅フィルファクタステータ設計
● 熱伝導性ポッティング材
● 対流を向上させるリブ付きアルミニウムハウジング。
これらの機能により、ディレーティングが軽減され、24 時間 365 日の稼働でも安定したトルク出力が維持されます。
▌パート IV: アプリケーション ドメイン
4.1 精密製造
マイクロアセンブリやエレクトロニクス製造では、精度要件は ±0.02 ~ 0.05 mm に達します。 ND-A5216-10 は、低バックラッシュ、デュアル フィードバック、スムーズなトルク出力によってこれを可能にします。これは、多軸ロボット アームの手首関節で、細かい方向付け作業を行う場合に特に効果的です。
4.2 協調ロボティクス
コボットは生産性を維持しながら、ISO/TS 15066 の力制限に準拠する必要があります。アクチュエータの低摩擦、高速トルク応答、低騒音設計により、人が安全に操作できるようになります。ヘリカルギアにより音響出力が低減され、職場の使いやすさが向上します。
4.3 物流の自動化
AGV や仕分けシステムでは、適応性が不可欠です。トルクモード制御により、ハードウェアを変更することなく、壊れやすい物品から重い荷物まで、さまざまなペイロードを処理できます。高速な加速と減速により、スループット効率が直接向上します。
4.4 検査および検査システム
計測や半導体の検査には超低振動環境が必要です。アクチュエータのローターのバランスとスムーズなギアの噛み合いにより、振動の伝達が最小限に抑えられ、隣接する敏感な機器での測定の安定性が確保されます。
▌パート V: iHF グループのエンジニアリング理念
iHF グループでは、アクチュエータの開発はシステムレベルの共同設計哲学に従っています。
● 電磁、熱、機械の各領域にわたるトルク密度の最適化
● コギングや飽和を早期に排除するマルチフィジックスシミュレーション
● アクチュエータと構造体を一体化したシステムレベルの振動制御
● 動的応答を向上させる制御を意識した機械設計
● 産業用の信頼性を実現する IEC 60068 ベースの耐久性検証
ND-A5216-10 はスタンドアロン コンポーネントではなく、インテリジェントな製造環境向けに設計された、相互に最適化されたモーション システムの一部です。
▌パート VI: 市場の状況
ロボットアクチュエータ市場は、以下の理由により急速に拡大しています。
● インダストリー 4.0 オートメーションと柔軟な生産システム
● 人間の共有環境における協働ロボティクスの成長
● 産業機械の小型化
● コンパクトスペースでのさらなるトルク密度の要求
これに関連して、ND-A5216-10 のような統合アクチュエーターは、モーター、ギアボックス、センシングを 1 つのアーキテクチャに統合することでシステムの複雑さを軽減し、OEM 開発サイクルを加速し、信頼性を向上させます。
❓ よくある質問
Q1: ND-A5216-10 はモーター + ギアボックスシステムとどう違うのですか?
モーター、遊星ギアボックス、デュアルエンコーダーを共同設計のシステムに統合し、アライメントエラーを排除し、閉ループ精度を向上させます。
Q2:バックラッシ性能はどのくらいですか?
3 分角未満。長いロボット アームのミリメートル未満の位置決め誤差に相当します。
Q3: なぜデュアルエンコーダなのでしょうか?
出力位置を直接測定することで推論エラーを排除し、軌道精度を向上させ、予知保全を可能にします。
Q4: トルク制御は対応していますか?
はい。このアクチュエータは、力に敏感なアプリケーションに適した高帯域幅応答によるリアルタイムのトルク、速度、および位置制御をサポートします。
Q5: 協働ロボットに適していますか?
はい。低騒音、準拠したトルク制御、高速応答により、人間とロボットのコラボレーション環境に適しています。
Q6: 物流システムにおいてどのようなメリットがありますか?
適応トルク制御により、ハードウェアを変更することなく、質量と脆弱性が異なる混合ペイロードの処理が可能になります。
Q7: iHFグループはどのようなサポートを提供していますか?
CAD モデル、トルク速度データ、熱解析、OEM 統合のためのアプリケーション レベルのエンジニアリング サポート。

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar 見積もり依頼
見積もり依頼